
























功能摘要
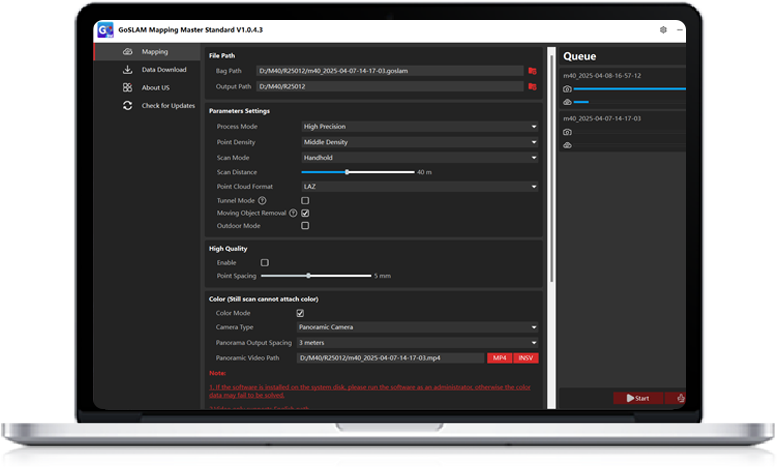
GoSLAM Mapping Master是一款桌面端解算软件
 桌面端解算软件
桌面端解算软件
用户可根据实际项目自行选择设备主机端及桌面端解算方式
提高整体作业效率,满足多种需求
主要功能
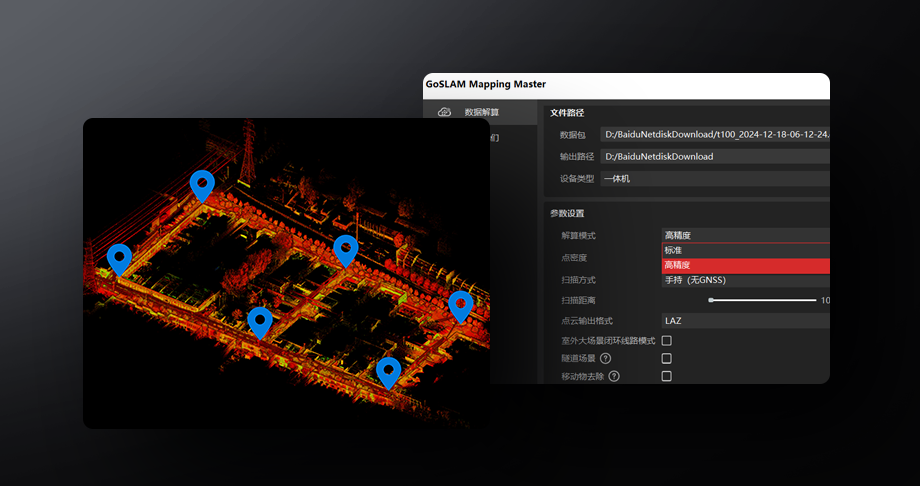
多种场景解算模式
支持根据扫描场景及要求切换不同精度及场景模式进行解算。

全景附色
支持全景视频合成,无需第三方软件点云着色与全景视频一站式完成。
多种扫描方式
支持车载、背包、手持等多种RTK连接模式,
支持地理坐标输出,支持多种扫描场景解算模式。

数据批量解算
支持数据队列,多数据批量处理,无需人员值守。
锚点解算
已知点坐标参与解算,对数据进行高精度纠偏,让手持采集也可以获得高精度数据,并且支持全场景使用。

核心优势
解算模式灵活适配

GoSLAM Mapping Master 支持设备主机端与桌面端解算方式随意切换,用户可依据项目场景、数据规模与精度需求,灵活抉择。无论是室内狭小空间的精细扫描数据处理,还是室外大范围场景的海量数据解算,都能适配,显著提升整体作业效率。
高精度锚点解算
运用锚点平差解算功能,在解算时引入已知点坐标对数据开展高精度校正。即使是通过手持设备采集的数据,也能借此获得高精度成果,确保在室内外大范围、低特征、高难度等复杂场景下,扫描数据的精度稳定性。

解算模式灵活适配
GoSLAM Mapping Master 支持设备主机端与桌面端解算方式随意切换,用户可依据项目场景、数据规模与精度需求,灵活抉择。无论是室内狭小空间的精细扫描数据处理,还是室外大范围场景的海量数据解算,都能适配,显著提升整体作业效率。
高精度锚点解算
运用锚点平差解算功能,在解算时引入已知点坐标对数据开展高精度校正。即使是通过手持设备采集的数据,也能借此获得高精度成果,确保在室内外大范围、低特征、高难度等复杂场景下,扫描数据的精度稳定性。
系统配置要求
-

笔记本
CPU11代i7或以上
内存32G或以上
显卡1070Ti或以上
-
台式机
CPU10代i5及以上
内存32G或以上
显卡1070Ti及以上
*电脑配置及硬盘容量根据单次处理的数据量来选择即可,以上具体型号为盘煤及小范
围数据处理所需配置,涉及多数据拼接或大范围数据处理的用户请自行提高配置





